BeagleRover
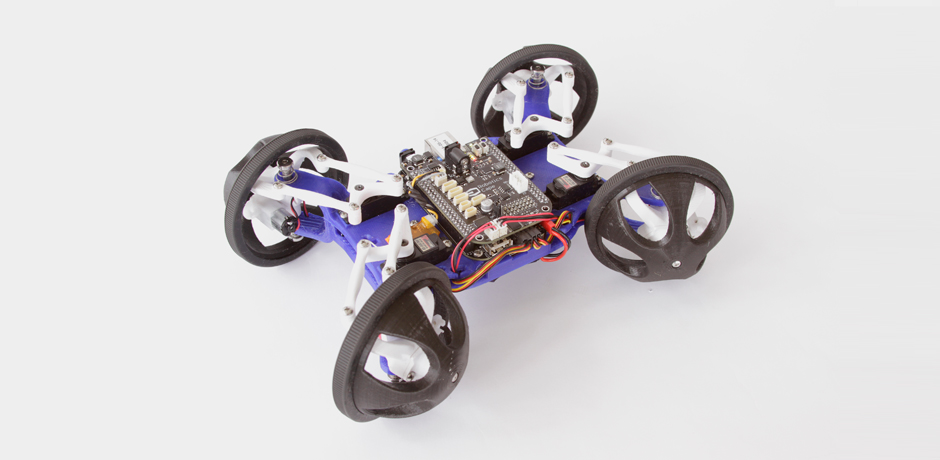
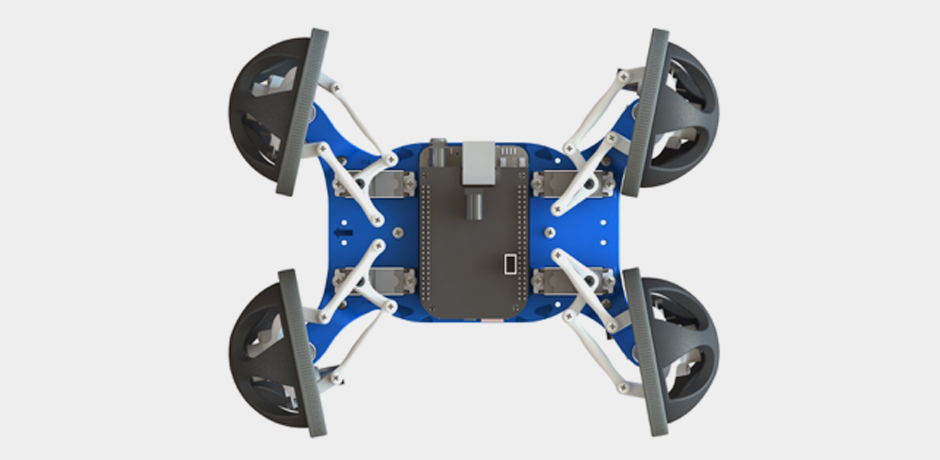
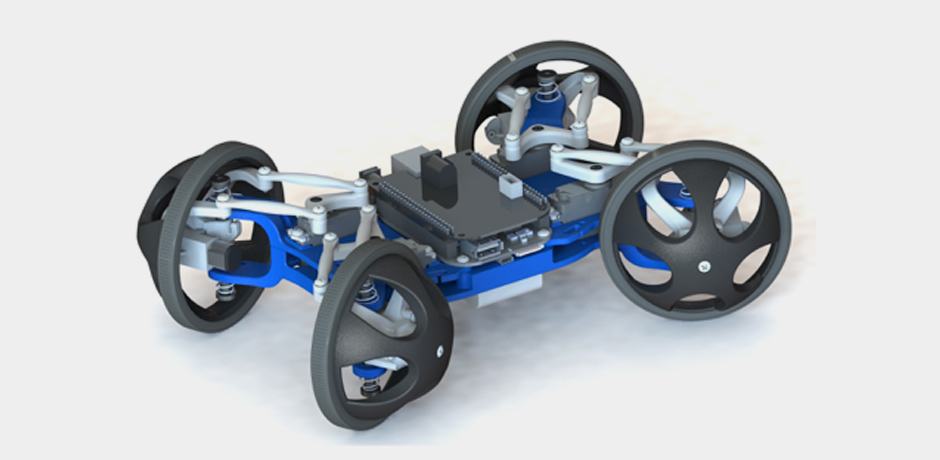
BeagleRover is a unique 4-wheel, extreme-angle independent steering vehicle.
While BeagleMiP provides a dynamically unstable system that students learn to balance with feedback, BeagleRover provides a dynamically stable system with the unique kinematics that follow from 4-wheel, extreme-angle steering. Each wheel can independently turn 120 degrees and is driven by an independent motor. The independent steering enables an extremely tight turning circle, allowing the vehicle to slip sideways into a tight parking spot or spin in place around its centroid. The BeagleRover helps students learn robotics programming, and it also provides a stable sensor platform for driving in confined areas.

April 27, 2015
New CISA3 Special Projects Coordinator: Transforming Students from Consumers into Makers




June 6, 2014
Researchers Use 3D Visualization Technique to Document Underwater Cave, Paleoamerican Remains